
go through: Dr. Veronica Escobar-Ruiz
Radar is the abbreviation for RADior Dattention AND rightTransmission is the process of transmitting electromagnetic waves through an antenna and, in the presence of an object, reflecting the radio waves toward the receiving antenna. The reflected amplitude and phase of the signal depend on the characteristics of the object (such as size, shape, orientation, and material). The Institute of Electrical and Electronics Engineers (IEEE) classifies radar frequencies into frequency bands based on their range. On the electromagnetic spectrum, such as L-, S-, C-, X- and Xu-Band, the ranges are 1-2GHz, 2-4GHz, 4-8GHz, 8-12Ghz and 12-18GHz respectively.
One of the most common radar technologies is synthetic aperture radar (SAR), which creates 2D images, such as photographs in optical systems. SAR systems on satellite platforms have become an important means of obtaining data for remote sensing. In satellite data, the smaller available spatial resolution is 5m x 20m, but this is usually averaged to 20m x 20m to facilitate interpretation. However, this coarse resolution limits the airspace system's ability to distinguish features (e.g., soil, vegetation, water bodies) in the scanned area. Therefore, the use of ground-based radar systems can provide high-resolution data and reduce this spatial uncertainty.
At the Department of Meteorology at the University of Reading, we have developed a pair of ground-based radar systems, a drone radar and a radar drill, which operate in the C-band frequency range using Frequency Modulated Continuous Waves (FMCW). Radar under the FMCW method emits radio waves that vary linearly over a wide frequency range, providing better range resolution than unmodulated systems.
The UAV radar consists of a C-band system, a path antenna array, and a small single-board computer (Fig. 1a). The radar operates in the frequency range 5.2 GHz to 6.0 GHz and uses one transmitter and two receiver antennas. The construction of a mechanical structure called a gimbal provides movement of the antenna in the vertical direction (measured in degrees) as well as across the horizontal direction to achieve side-view or top-view antenna settings. Additionally, the antenna can be rotated to provide configurations for different polarization modes (VV, HH and VH). Likewise, the radar unit is a software-controlled instrument that operates the radar on a 3m track from the starting point to the end point (Fig. 1b). The instrument consists of a motor unit, a vector network analyzer (VNA) and two horn antennas, a transmitter and a receiver. The software allows different VNA configurations (e.g. frequency range [4GHz to 8GHz]and power) as well as settings for the motor units (e.g., starting position, scan length, and increment). The antenna can move vertically in degrees along the track and rotate to provide different polarization patterns. The configuration flexibility of both systems allows for multiple imaging modes such as true beam mapping, synthetic SAR, SAR interferometry, 3D tomography and tomography (TP, Morrison and Bennett 2014). Different polarization modes provide information about the structure of the scanned area. For example, VV mode is sensitive to bare soil and water, while VH mode is sensitive to vegetation canopy (leaves and branches).

Figure 1.a) UAV radar system consists of C-band radar, patch antenna and single-board computer.

Figure 1.b) Radar-Rig consists of C-band radar, horn antenna and motor unit.
The TP method is similar to SAR, except that the antenna viewed along the track direction is rotated 90°. This method allows for vertical backscatter canopy profiles. Both systems have been tested under the TP method. The high-resolution mapping of a UAV radar system is about 0.5 m along the flight path and 0.5 m vertically (Figure 2), while the resolution of the radar drill is smaller (0.22 cm along the track and 0.22 cm along the track). is 3.75 cm).

Figure 2. Tomographic cross-section image with reconstruction angle of 0°. The path length through the trees is 140 m, and the gaps in the image correspond to the reset time of the radar. The upper picture is co-polarization (HH), and the lower picture is cross-polarization (VH). Data were collected at the Stoflaket wetland in northeastern Sweden.
Although similar platforms exist (Schartel et al., 2018; Charvat, Kempell, & Coleman, 2008), the product developed by the Department of Meteorology (University of Reading) is the first of its kind for environmental monitoring applications (e.g. soil moisture, biomass density, etc.). The images obtained by these two ground-based radar systems in the field can be magnified to explain what the satellite images are really “seeing”. The results will help understand how backscattered signals are generated in space and time, issues that may complicate their interpretation, and factors that may cause signal distortion. This will enable more complete and timely utilization of satellite data.
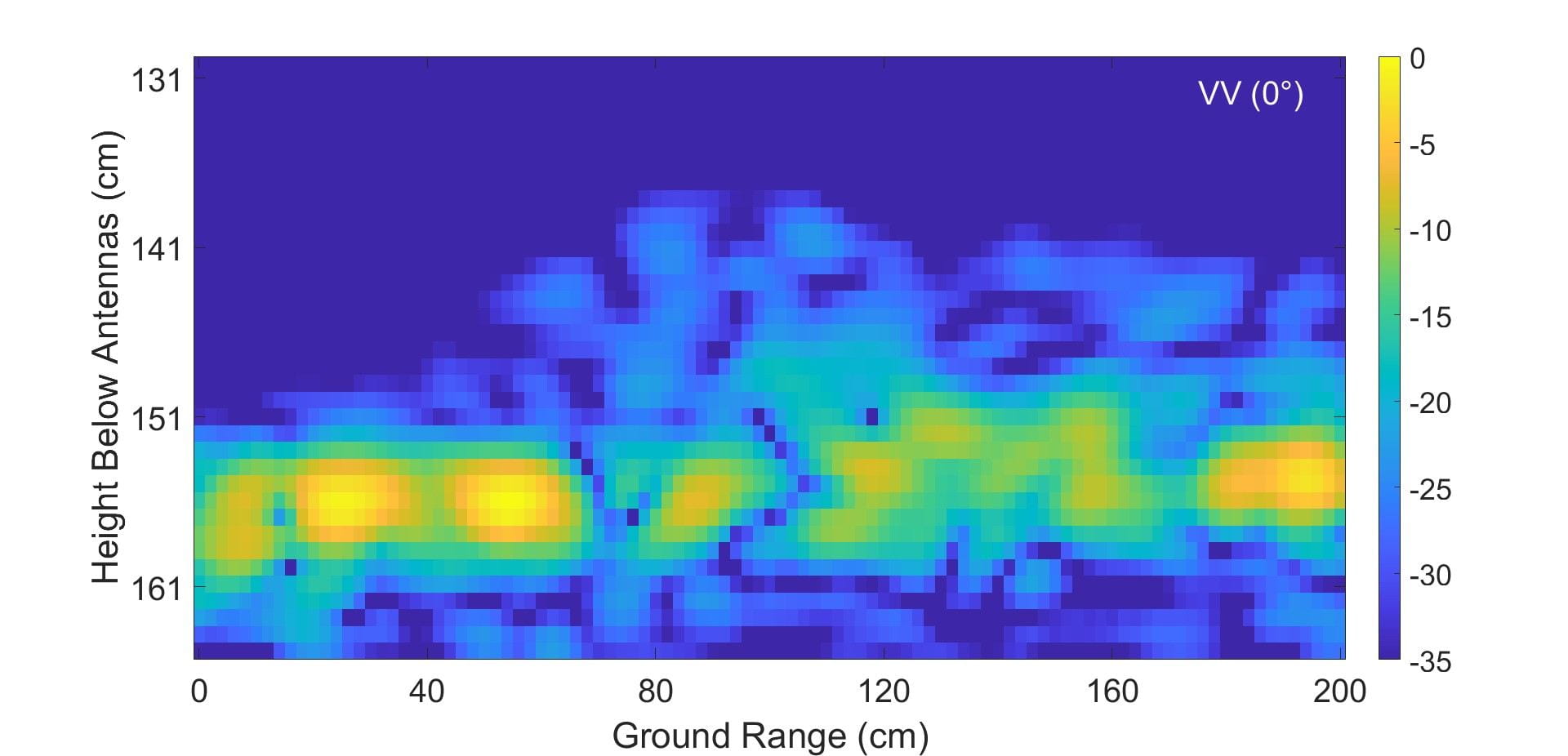
Figure 3. (a) Tomographic cross-sectional image with a projection angle of 0°. Path length on low shrubs is 3m. The above figure (a) is co-polarization (VV). Data were collected at the Stoflaket wetland in northeastern Sweden.

Figure 3. (b) Tomographic cross-sectional image with a projection angle of 0°. Path length on low shrubs is 3m. The figure below (b) is cross polarization (VH). Data were collected at the Stoflaket wetland in northeastern Sweden.
References and further reading:
Gregory Charvat, Leo Kemper and Chris Coleman. 2008. “Low power consumption and high sensitivity X-band railway SAR imaging system [Measurement’s Corner]”. IEEE Antennas and Propagation Magazine 50(3):108-15. doi:10.1109/map.2008.4563576.
Morrison, Keith, and John Bennett. Year 2014. IEEE Transactions on Geoscience and Remote Sensing 52(2):1350-5. doi:10.1109/tgrs.2013.2250508.
Chartres, Markus, Ralf Burr, Winfried Meyer, Nando Dortsch, and Christian Waldschmidt. 2018. “UAV-based ground-penetrating synthetic aperture radar.” In 2018 IEEE MTT-S International Conference on Microwave Smart Mobility (ICMIM),1-4.